Colloquium aankondiging
Faculteit Engineering Technology
Afdeling Applied Mechanics & Data Analysis (MS3)
Master opleiding Mechanical Engineering
In het kader van zijn/haar doctoraalopdracht zal
Wevers, M.L. (Merel)
een voordracht houden getiteld:
Extending the applicability of the floating frame formulation in global coordinates
| Datum | 15-05-2024 |
| Tijd | 10:00 |
| Zaal | HT-700B |
Samenvatting
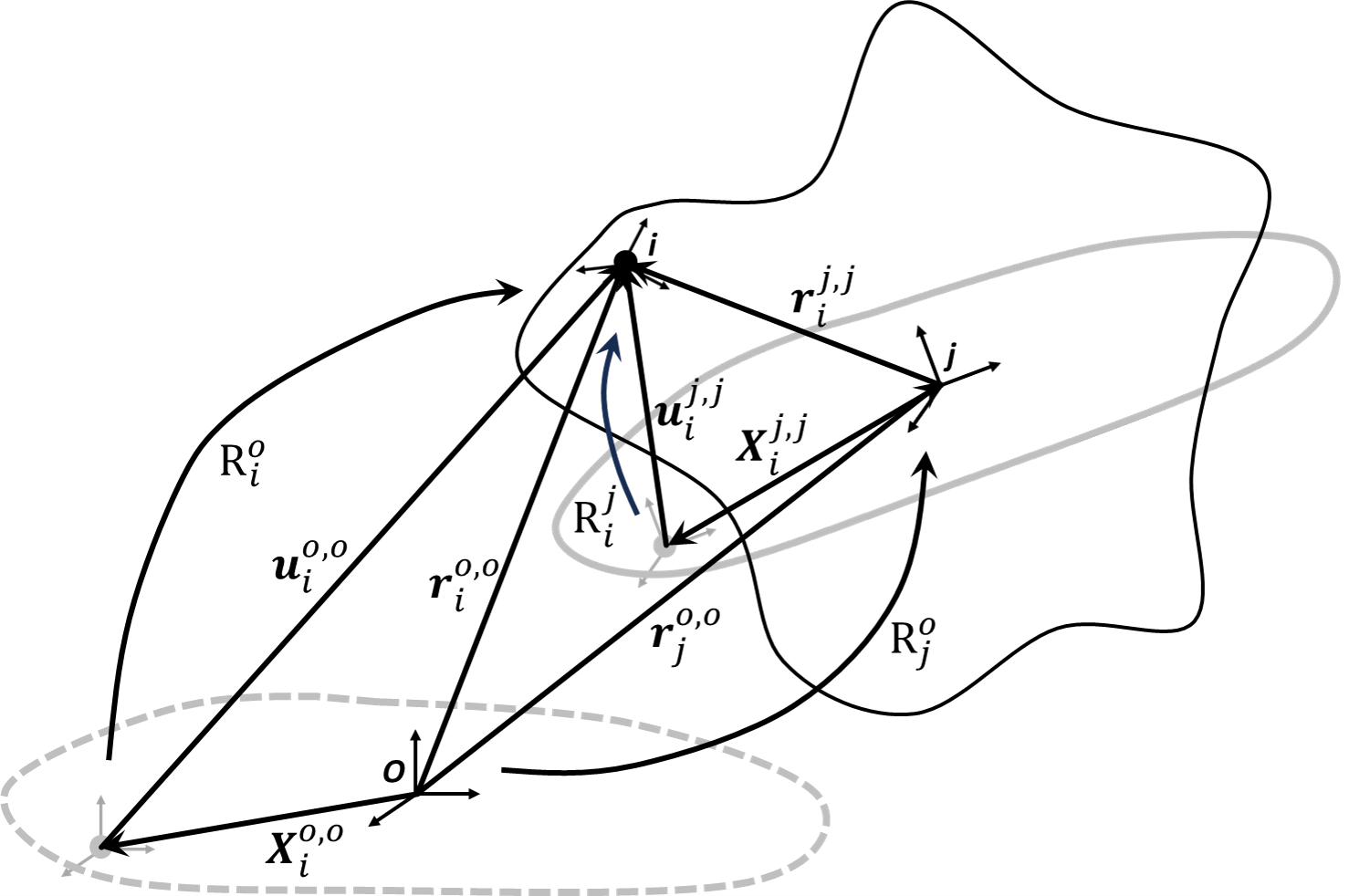
The superelement floating frame formulation models the motion of a flexible body by making a distinction between its overall rigid-body motion and its local deformations and expresses its equations of motion or equilibrium in terms of the global nodal degrees of freedom of its interface points. Limitations of this formulation are that it requires the linear finite element model describing the local flexible behaviour to be reduced using a reduction basis that only contains boundary modes and it can only be applied to problems in which the local deformations remain small. Two generalisations are therefore proposed: the generalised superelement formulation and the nonlinear floating frame formulation.
The generalised superelement formulation allows for the use of an arbitrary reduction basis that is able to (1) describe rigid-body motion and (2) describe the local nodal degrees of freedom of the interface points independently. It expresses the governing equations in terms of the global nodal degrees of freedom of the interface points as well as a set of internal flexible coordinates.
The nonlinear floating frame formulation makes a distinction between the overall rigid-body motion and local deformations of a body or its individual elements and models the local flexible behaviour using a geometrically nonlinear model to allow for arbitrarily large local deformations. It expresses the governing equations in terms of all global nodal degrees of freedom and can be considered an alternative to the total and updated Lagrangian nonlinear finite element formulations.
The reduction bases obtained with the most commonly used component mode synthesis methods that can be used in the generalised superelement formulation are presented. The equations of motion of a single flexible body and the coupling method to obtain the constrained equations of motion of a flexible multibody system are formulated for the generalised superelement formulation. The global internal load vector and tangent stiffness matrix that can be used in incremental solution procedures are formulated for the nonlinear floating frame formulation using continuum elements. Both methods are implemented and validated using a benchmark problem. The superelement floating frame formulation and the co-rotational nonlinear finite element formulation are illustrated as simplifications of the nonlinear floating frame formulation.
The validation results indicate the successful implementation of the generalised superelement formulation and the nonlinear floating frame formulation. Recommendations for further research and further extensions of both methods are provided.
Examencommissie |
voorzitter Handtekening d.d. |
|
| Bojana Rosic Jurnan Schilder Semih Perdahcioglu |
(voorzitter) (begeleider) (extern lid) |
|